Contents
Exercise 2
Check doc nargin and doc nargout for details
%Define a function that can take up to 2 inputs and produce up to 2 outputs % function [ sum, abssum ] = addme( a,b ) % ADDME % %nargin is the number of arguments given. If 1, output is a+a. If 2, % %output is a+b. % switch nargin % case 2 % sum = a+b; % case 1 % sum = a+a; % otherwise % sum = 0; % end % %nargout is the number of output arguments requested. If it is 1, the only % %thing that will be returned is sum. If it is > 1, both sum and absum will % %be returned. It the second case we need to define abssum. % if nargout > 1 % abssum = abs(sum); % end %end
Exercise 3
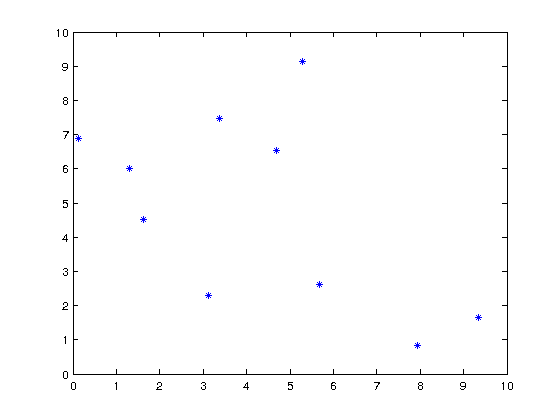
generate points
x = 10*rand(1,10)
y = 10*rand(1,10)
plot(x,y,'b*')
x =
Columns 1 through 7
9.3401 1.2991 5.6882 4.6939 0.1190 3.3712 1.6218
Columns 8 through 10
7.9428 3.1122 5.2853
y =
Columns 1 through 7
1.6565 6.0198 2.6297 6.5408 6.8921 7.4815 4.5054
Columns 8 through 10
0.8382 2.2898 9.1334
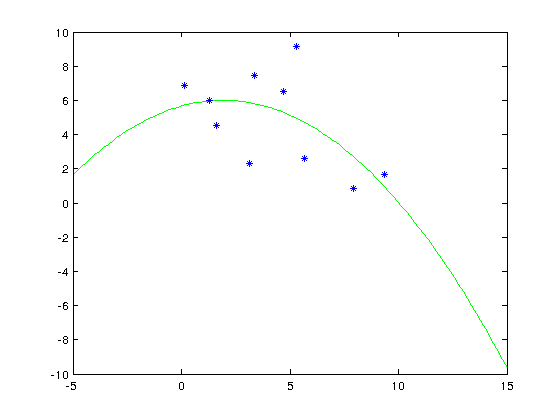
%Polyfit will fit a polynomial through the points:
p = polyfit(x,y,2);
Plot to check.
xfit = linspace(-5,15); yfit = polyval(p,xfit); plot(xfit,yfit,'g',x,y,'b*') %line is green ('g') and points are marked with blue stars ('b*')
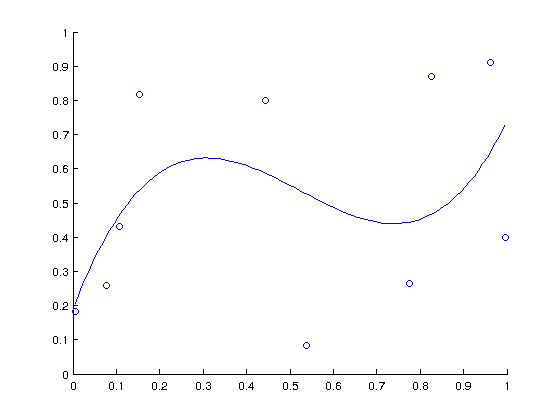
%The fit using fminsearch. fminsearch minimizes a function, so we need to %define one. The function we need to minimize is the distance of the points %from the polynomial. % We want to find a polynomial of degree 3 that fits at best a given set of % data. % We start creating 10 points at random and plotting them: data_points = rand(10,2); scatter(data_points(:,1),data_points(:,2)); hold on % Then, we set up a handler to a function that first calculates for each point the difference % between the point measured and the point on a curve of order three and then calculates the sum % of the squares of these discrepancies. f = @(a) sum((data_points(:,2) - polyval(a,data_points(:,1))).^2); % The polynomial that fits at best the data is the one that minimized the % function square of errors given above. We have learnt to minimize % functions with fminsearch: [a,error] = fminsearch(f, [0, 0, 0, 0]); % Now a contains the coefficient of the polynomial. x = min(data_points(:,1)):0.01:max(data_points(:,1)); plot(x,polyval(a,x)); hold off
Exercise 4.
%vector as [x;y;z] p0 = [0;0;1.5]; %starting point u = [1;1;1]; %starting direction ut = u / sqrt(u'*u); %normalized g = [0;0;-9.81]; s = 10; v0 = u*s ; % starting speed %Landing time is tl = (-v0(3) - sqrt(v0(3)^2 - 2*p0(3)*g(3)))/(g(3)) %location at landing time: p = p0 + v0*tl + g*tl^2/2
tl =
2.1791
p =
21.7908
21.7908
-0.0000
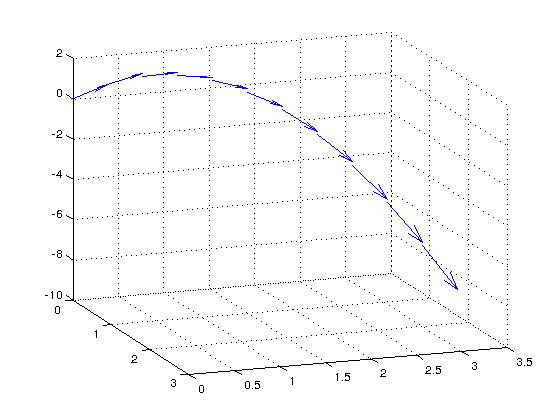
Vector fields Projectile Path Over Time using quiver3 \(\mathbf{p}(t)=\mathbf{v}t+\frac{\mathbf{a}t^2}{2}\)
\begin{align*} \begin{bmatrix}x\\y\\z \end{bmatrix} &=\begin{bmatrix}v_x\\v_y\\v_z \end{bmatrix} t+\frac{1}{2}\begin{bmatrix}a_x\\a_y\\a_z \end{bmatrix}t^2\\ &=\begin{bmatrix}2\\3\\10 \end{bmatrix} t+\frac{1}{2}\begin{bmatrix}0\\0\\-32 \end{bmatrix}t^2 \end{align*}
vz = 10; % velocity constant a = -32; % acceleration constant % Calculate z as the height as time varies from 0 to 1. t = 0:.1:1; z = vz*t + 1/2*a*t.^2; % Calculate the position in the x-direction and y-direction. vx = 2; x = vx*t; vy = 3; y = vy*t; % Compute the components of the velocity vectors and display the vectors u = gradient(x); v = gradient(y); w = gradient(z); scale = 0; figure quiver3(x,y,z,u,v,w,scale) % Change the viewpoint of the axes to [70,18]. view([70,18])
Find the shooting angle to get the requested landing spot: aiming at [1,0,0]
% First define lower and upper limit for the initial direction ulow = [0.001;0;1]; %I'm pretty sure it needs to be higher than this uhigh = [100;0;1]; % and lower than this % Normalize the direction vectors ul = ulow/sqrt(ulow'*ulow); uh = uhigh/sqrt(uhigh'*uhigh);
Get landingpoints for the high and low angels.
ll = landingpoint(p0,s*ul,0.1,0.1); lh = landingpoint(p0,s*uh,0.1,0.1); % Calculate the error (distance from the point we are aiming at) % We are aiming at [1,0,0] rl = ll(1)-1; rh = lh(1)-1;
The landing point as a function:
%function [ p ] = landingpoint( p0,v0,c,k ) % %LANDINGPOINT % g=[0;0;-9.81]; % dt=0.001; % p=p0;v=v0; % while p(3) > 0 % a = g - k*v -c * v*sqrt(v'*v); % pnew = p + v*dt; % vnew = v + a*dt; % p=pnew; v=vnew; % end % %In the end the solution bullet will be slightly underground, % %but it's accurate enough %end
Now find the correct shooting angle. Lets use the bisection algorithm, one of the simplest algorithms for finding the zero of a function. We start knowing that there is a zero in the range [ulow,uhigh]. In this case the function is the error
delta = 10; %The error of the previous step while delta > 0.001; % Define a new middle point between the too high and too low values umid = ulow+uhigh/2; um = umid/sqrt(umid'*umid); %Normalize lm = landingpoint(p0,s*um,0.1,0.1); % Find the landing point rm = lm(1)-1; % and the error for the middle point % Now if the lower and the middle point have different sign, there is a % zero between them. Continue to look for a zero between in the range % [ulow,umid]. if rm*rl < 0 uhigh = umid; % If not, we the zero must be in the range [umid,uhigh] else ulow = umid; end % Check the error, |rm| delta = sqrt(rm*rm); end
Now the correct direction is umid.
um = umid/sqrt(umid'*umid) %Normalized landingpoint(p0,s*um,0.1,0.1) %Check that it hits the desired position
um =
0.0852
0
0.9964
ans =
0.9994
0
-0.0019